文|富充
修改|苏建勋
一句话介绍
北京达奇月泉仿生科技有限公司为仿生人形机器人整机及中心部件研制企业,公司近来推出的仿生灵活手“应手Y-Hand M1”具有38个自由度,改写当时全球灵活手自由度的最高纪录。

应手Y-Hand M1,图源:企业供给
团队介绍
公司由两位创始人一起建议。
其间任露泉为中国科学院院士、吉林大学教授、国际仿生工程学会声誉理事长。
任雷为英国曼彻斯特大学终身教授、教育部长江学者,在仿生机器人和人体科学范畴已深耕二十五年。
产品及事务
月泉仿生的产品首要包括“信手X-Hand”、“应手Y-Hand”两个系列灵活手,及全尺度通用具身智能轮式人形机器人W-Bot和双足人形机器人X-Bot两个系列。
“应手Y-Hand M1”具有38个自由度及全手触觉感知, 在多个关键性能指标上,全面逾越刚性灵活手。
应手Y-Hand M1整手握力28.7kg,是刚性手的6倍以上。0.2 秒即可完结五指闭合,速度是刚性手的3倍以上。单指指尖重复定位精度达0.04mm,是刚性手的2倍以上。一起还具有远超刚性手的和婉性和灵活性。

人手、应手Y-Hand M1、刚性灵活手的数据比照,图源:企业供给
除了“应手Y-Hand M1”,月泉仿生最新发布的产品矩阵还包括刚性灵活手“信手X-Hand M1”,双足人形机器人“博行X-Bot”、和轮式人形机器人“博文W-Bot”。
其间,“信手X-Hand M1”是具有11个自由度及530个活络触觉感知单元的仿生灵活手,“博文W-Bot”为全球最小底盘轮式人形机器人,“博行X-Bot”为全尺度通用双足人形机器人。
公司不同产品之间的技能彼此相关。
$$$二&粉色蕾丝漫画在线阅读无删减#23569;&小驴的巅峰人生全集无删减版#29239;的甜心无删减版$$$机器人“博行X-Bot”可搭载公司出产的灵活手,完结全身运动与手部精密操作的合作;信手X-Hand系列与应手Y-Hand系列也在触觉算法、驱动技能等方面彼此学习。中心壁垒
“应手 Y-Hand M1”选用的中心技能,源自任雷教授国际创始的“仿生拉压体机器人理论与技能”。
“仿生拉压体”是源自人体骨骼肌肉体系的仿生多层级资料结构刚柔耦合体系,由首要接受压力的硬质构件(如骨骼、软骨等),和首要传递拉力的柔质构件(如韧带、肌肉、肌腱等)构成。
仿生拉压体机器人理论与技能经过对人体骨骼肌肉体系功用原理二十余年的深入研究,以及在仿生机器人范畴继续的立异性工程化实践,终究在理论与技能层面完结了三项推翻性立异。
一是推翻传统刚性铰链式规划,重现了生物关节的三维6自由度天然运动,大幅提高了关节灵活性和和婉性;
二是根据自研的磁集电驱人工肌肉重现了人体骨骼肌的生物力学特性,完结了高质量功率密度比的驱动,以及驱动、变速、传动一体化动力体系;
三是根据人体骨骼肌肉体系的仿生多层多级刚柔耦合体系规划,能够完结体系级的动力传输、能量办理和环境交互。
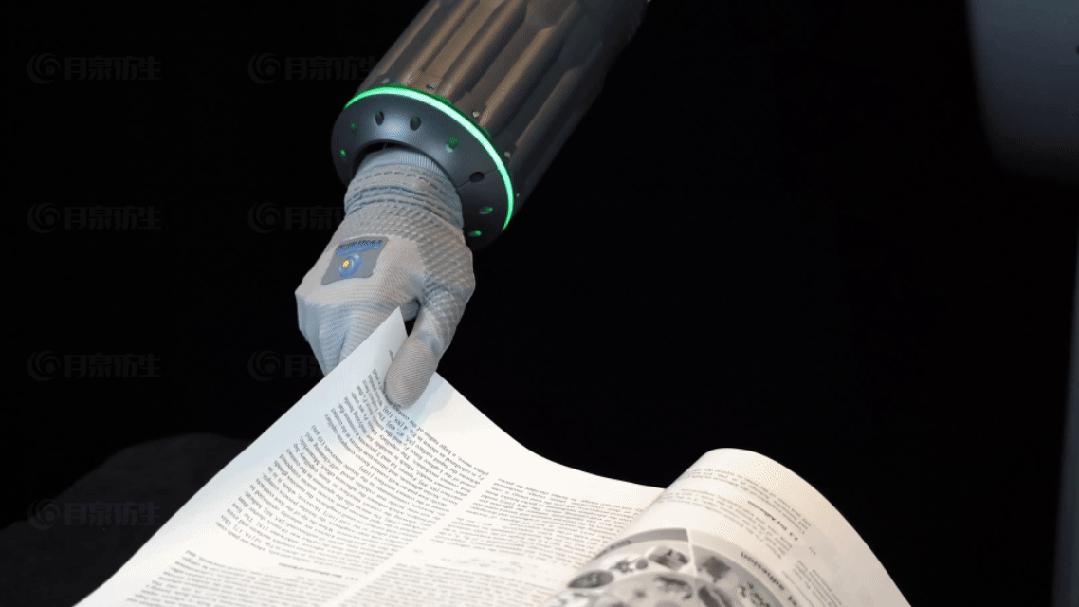
“应手Y-Hand M1”翻阅册页,图源:企业供给
根据上述技能,“应手 Y-Hand M1” 能够担任悉数33种Feix分类灵活抓握和高度类人的精密操控。
比方,捻动扑克牌时,完结指尖与牌面间精准可控的摩擦力;牵线搭桥时,拇指与食指稳稳捏住线头,慢慢穿过针眼的动作流通,甚至能仿照人类手部细微的调整起伏。
此外,“应手 Y-Hand M1”还能够丝滑地完结拧瓶盖、翻书等动作。

“应手Y-Hand M1”牵线搭桥,图源:企业供给

“应手Y-Hand M1”捻扑克牌,图源:企业供给
Founder考虑
马斯克从前说过,灵活手的研制难度和工作量占到人形机器人整机开发的一半。最近的Science、Science Robotics等国际学术尖端期刊均以为手臂灵活操控是机器人工程范畴最具挑战性的国际难题之一。
灵活手的评判中心在于“能干活”和“能干好”,即使命掩盖才能与成功率。要想进入出产一线,其使命成功率有必要挨近人手约98%的水平。
灵活手的自由度数量过低会影响灵活性,过高则添加本钱与复杂度。应手Y-Hand M3系列将完结约70个自由度,到达或超越人手水平。

仿生拉压体灵活手臂示意图,图源:企业供给
高度灵活的仿生手在智能制作(如轿车制作、3C产品制作等)、巡检运维、国防军事等范畴有巨大使用潜力。它能完结传统刚性夹爪和刚性手无法完结的灵活精密使命,极大提高出产功率与产品质量。
家庭服务与养老护理作为长远目标使用场景,对灵活和婉操控与人机安全性提出了远超工业场景的苛刻要求,一起也意味着要霸占更多技能难关。
疲惫寿数、耐用性等是性价比的重要组成部分,长期使用本钱更低。因而月泉仿生的灵活手不打价格战,优先界说功用、场景与需求。在工业使用中,安稳牢靠与高质量完结使命比贱价更重要。
高自由度灵活手需合作新式的仿生具身智能大模型,交融多源感知,物理国际的了解、本体的精巧规划和仿生神经肌肉操控。